1) modélisation des pièces par des « solides parfaits · 3) modélisation cinématique des...
TRANSCRIPT
Objectif ter les études du fonctionnement, des efforts, des vitesses
1) Modélisation des pièces par des « solides parfaits ». Nous supposerons dans nos études mécaniques (sauf indication contraire) que les pièces mécaniques sont des solides parfaits : NB : Les pièces déformables telles que les ressorts seront exclues de nos calculs lorsque nous utiliserons
2) Modélisation des liaisons. On peut parler de liaison entre 2 pièces lorsque celles-ci sont en contact . Une liaison est un modèle du comportement cinématique
21) Modélisation des liaisons par des « liaisons parfaites ». Nous supposerons dans nos études mécaniques (sauf indication contraire) que les liaisons entre 2 pièces sont des liaisons parfaites : Une liaison parfaite est donc une liaison théorique, tant du point de vue géométrique que du point de vue de la nature physique du contact.
22) Notion de repère local. En général, le repère local associé à une liaison entre deux solides n'appartient à aucun des deux solides. De plus, l'origine sera plutôt placée en un point caractéristique de la liaison et les vecteurs directeurs de sa base correspondent dans la mesure du possible à des axes de symétrie, de révolution, ... Enfin, il sera choisi de sorte que les mouvements élémentaires soient indépendants.
23) Soit 0, , ,R x y z le repère local associé à la liaison entre deux solides 1 et 2. On peut définir des mouvements relatifs : Tx = liberté de mouvement de translation de direction x , ( , )O x ,
autorise entre les 2 solides considérés. (Attention à la liaison hélicoï Il existe donc 6 degrés de liberté possibles : - 3 translations Tx, Ty et Tz de 1 par rapport à 0, - 3 rotations Rx, Ry et Rz de 1 par rapport à 0. Par conséquent, le nombre de degrés de liberté entre deux solides est le nombre de paramètres cinématiques indépendants à DÉFINIR pour caractériser le mouvement relatif entre ces deux solides.
- indéformables - géométriquement parfaits - homogènes (corps dont les constituants sont de même nature ; ce
- isotropes (corps dont les propriétés mécaniques sont identiques
dans toutes les directions ; ce qui nfibreuses par exemple)
corps qui ont une masse constante
- surfaces de contact géométriquement parfaites - jeu de fonctionnement nul entre les surfaces de contact - contact supposé sans adhérence
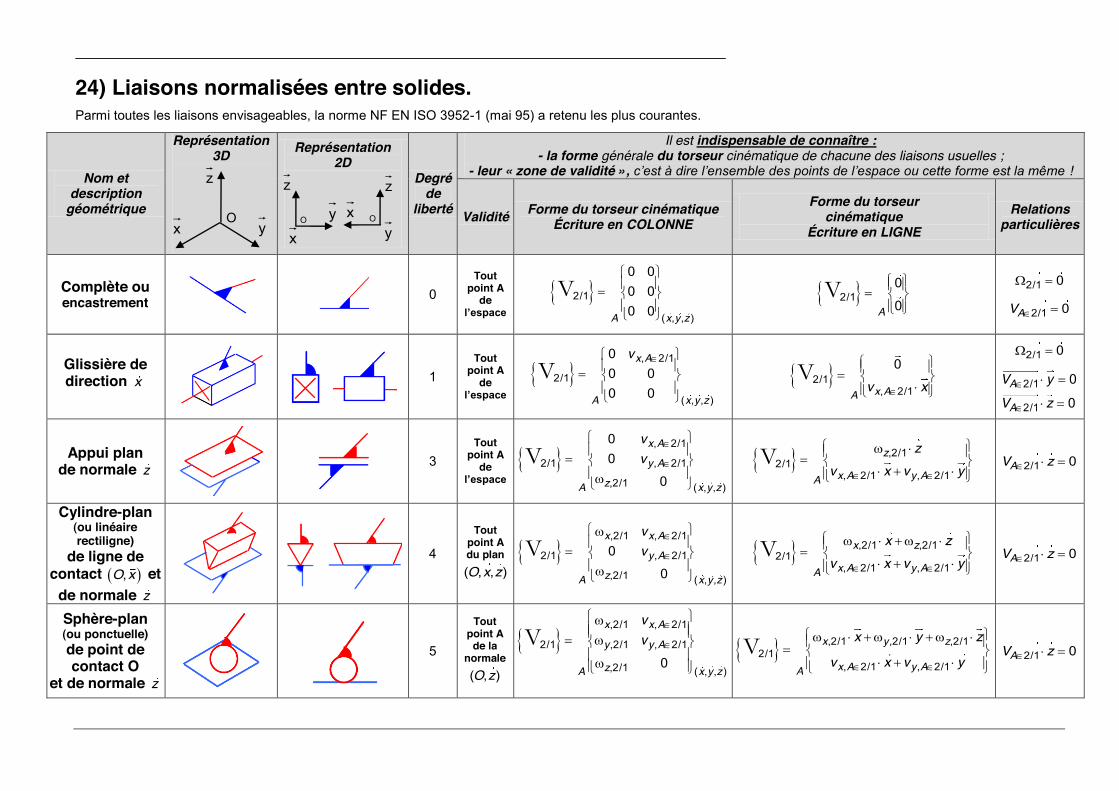
24) Liaisons normalisées entre solides. Parmi toutes les liaisons envisageables, la norme NF EN ISO 3952-1 (mai 95) a retenu les plus courantes.
Nom et description
géométrique
Représentation 3D
Représentation 2D
Degré de
liberté
Il est indispensable de connaître : - la forme générale du torseur cinématique de chacune des liaisons usuelles ;
- leur « zone de validité », !
Validité Forme du torseur cinématique
Écriture en COLONNE Forme du torseur
cinématique
Écriture en LIGNE Relations
particulières
Complète ou encastrement
0
Tout point A
de
2/1
( , , )
0 00 00 0A x y z
V 2/10
0AV 2/1 0
2/1 0AV
Glissière de direction x
1 Tout
point A de
, 2/1
2/1
( , , )
00 00 0
x A
A x y z
vV 2/1
, 2/1
0
x AA v xV
2/1 0
2/1
2/1
0
0A
A
V yV z
Appui plan de normale z
3 Tout
point A de
, 2/1
2/1 , 2/1
,2/1 ( , , )
00
0
x A
y A
zA x y z
vvV ,2/1
2/1, 2/1 , 2/1
z
x A y AA
zv x v y
V 2/1 0AV z
Cylindre-plan (ou linéaire rectiligne)
de ligne de contact ,O x et
de normale z
4
Tout point A du plan ( , , )O x z
,2/1 , 2/1
2/1 , 2/1
,2/1 ( , , )
0
0
x x A
y A
zA x y z
vvV ,2/1 ,2/1
2/1, 2/1 , 2/1
x z
x A y AA
x zv x v y
V 2/1 0AV z
Sphère-plan (ou ponctuelle) de point de contact O
et de normale z
5
Tout point A
de la normale ( , )O z
,2/1 , 2/1
2/1 ,2/1 , 2/1
,2/1 ( , , )0
x x A
y y A
zA x y z
vvV
,2/1 ,2/1 ,2/12/1
, 2/1 , 2/1
x y z
x A y AA
x y z
v x v yV 2/1 0AV z
x
y
z
O y
x
z
O
z
O y x
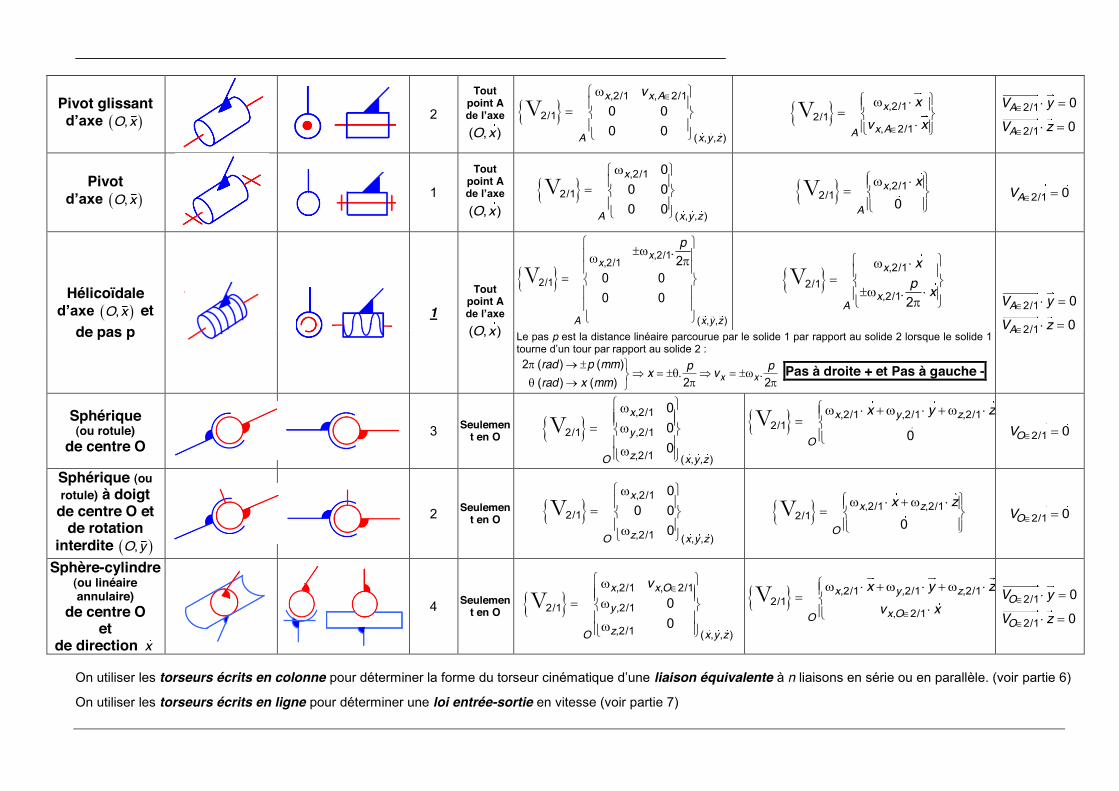
Pivot glissant ,O x
2
Tout point A
( , )O x
,2/1 , 2/1
2/1
( , , )
0 00 0
x x A
A x y z
vV ,2/1
2/1, 2/1
x
x AA
xv x
V 2/1
2/1
0
0A
A
V yV z
Pivot ,O x
1
Tout point A
( , )O x
,2/1
2/1
( , , )
00 00 0
x
A x y z
V ,2/12/1
0x
A
xV 2/1 0AV
Hélicoïdale ,O x et
de pas p
1
Tout point A
( , )O x
,2/1,2/1
2/1
( , , )
.2
0 00 0
xx
A x y z
p
V ,2/1
2/1,2/1. 2
x
xA
xp x
V
2/1
2/1
0
0A
A
V yV z
Le pas p est la distance linéaire parcourue par le solide 1 par rapport au solide 2 lorsque le solide 1 2 :
2 ( ) ( ). .2 2( ) ( ) x x
rad p mm p px vrad x mm
Pas à droite + et Pas à gauche -
Sphérique (ou rotule)
de centre O
3 Seulement en O
,2/1
2/1 ,2/1
,2/1 ( , , )
000
x
y
zO x y z
V ,2/1 ,2/1 ,2/1
2/10
x y z
O
x y zV
2/1 0OV
Sphérique (ou rotule) à doigt
de centre O et de rotation
interdite ,O y
2 Seulement en O
,2/1
2/1
,2/1 ( , , )
00 0
0
x
zO x y z
V ,2/1 ,2/12/1
0x z
O
x zV 2/1 0OV
Sphère-cylindre (ou linéaire annulaire)
de centre O et
de direction x
4 Seulement en O
,2/1 , 2/1
2/1 ,2/1
,2/1 ( , , )
00
x x O
y
zO x y z
vV
,2/1 ,2/1 ,2/12/1
, 2/1
x y z
x OO
x y zv x
V
2/1
2/1
0
0O
O
V yV z
On utiliser les torseurs écrits en colonne liaison équivalente à n liaisons en série ou en parallèle. (voir partie 6)
On utiliser les torseurs écrits en ligne pour déterminer une loi entrée-sortie en vitesse (voir partie 7)
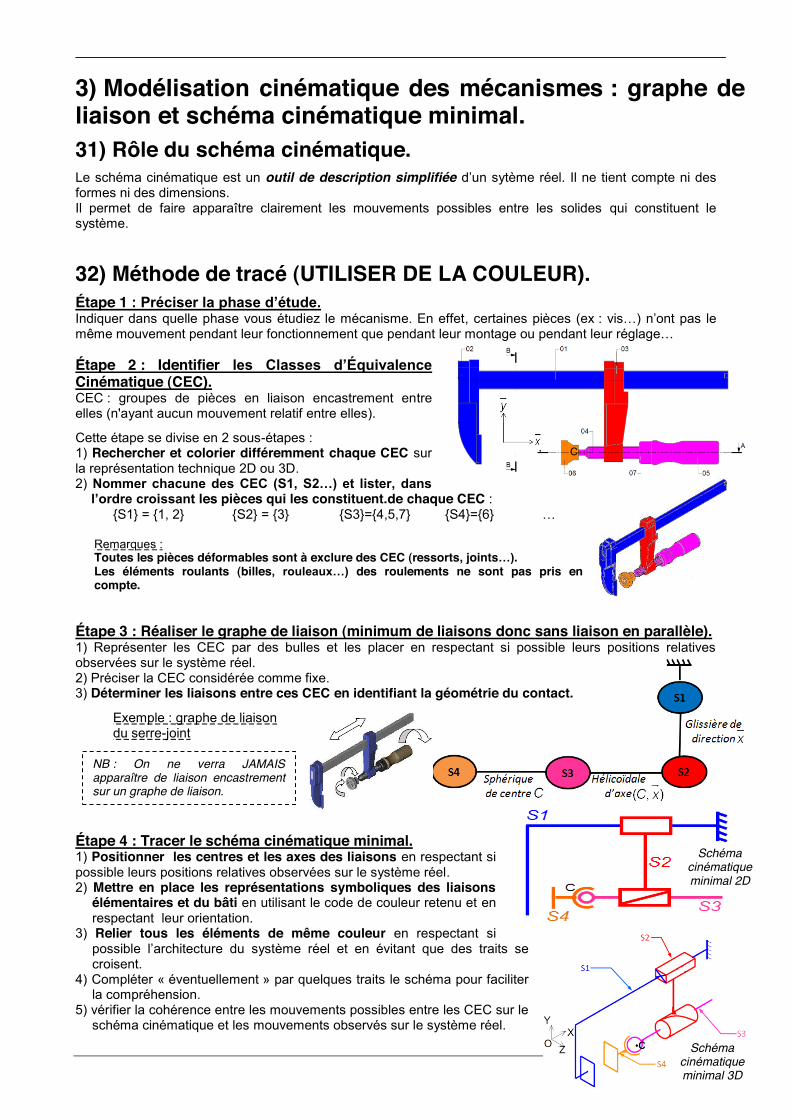
3) Modélisation cinématique des mécanismes : graphe de liaison et schéma cinématique minimal. 31) Rôle du schéma cinématique. Le schéma cinématique est un outil de description simplifiée Il ne tient compte ni des formes ni des dimensions. Il permet de faire apparaître clairement les mouvements possibles entre les solides qui constituent le système.
32) Méthode de tracé (UTILISER DE LA COULEUR). Étape 1 Indiquer dans quelle phase vous étudiez le mécanisme. En effet, certaines pièces (ex
Étape 2 : Identifier Cinématique (CEC). CEC : groupes de pièces en liaison encastrement entre elles (n'ayant aucun mouvement relatif entre elles).
Cette étape se divise en 2 sous-étapes : 1) Rechercher et colorier différemment chaque CEC sur la représentation technique 2D ou 3D. 2)
les pièces qui les constituent.de chaque CEC : {S1} = {1, 2} {S2} = {3} {S3}={4,5,7} {S4}={6}
Remarques : Toutes les pièces déformables sont à exclure des CEC (ressorts, joints . Les éléments roulants (billes des roulements ne sont pas pris en compte.
Étape 3 : Réaliser le graphe de liaison (minimum de liaisons donc sans liaison en parallèle). 1) Représenter les CEC par des bulles et les placer en respectant si possible leurs positions relatives observées sur le système réel. 2) Préciser la CEC considérée comme fixe. 3) Déterminer les liaisons entre ces CEC en identifiant la géométrie du contact.
Exemple : graphe de liaison du serre-joint
Étape 4 : Tracer le schéma cinématique minimal. 1) Positionner les centres et les axes des liaisons en respectant si possible leurs positions relatives observées sur le système réel. 2) Mettre en place les représentations symboliques des liaisons
élémentaires et du bâti en utilisant le code de couleur retenu et en respectant leur orientation.
3) Relier tous les éléments de même couleur en respectant si système réel et en évitant que des traits se
croisent. 4) Compléter « éventuellement » par quelques traits le schéma pour faciliter
la compréhension. 5) vérifier la cohérence entre les mouvements possibles entre les CEC sur le
schéma cinématique et les mouvements observés sur le système réel.
NB : On ne verra JAMAIS apparaître de liaison encastrement sur un graphe de liaison.
C
Schéma cinématique minimal 3D
Schéma cinématique minimal 2D
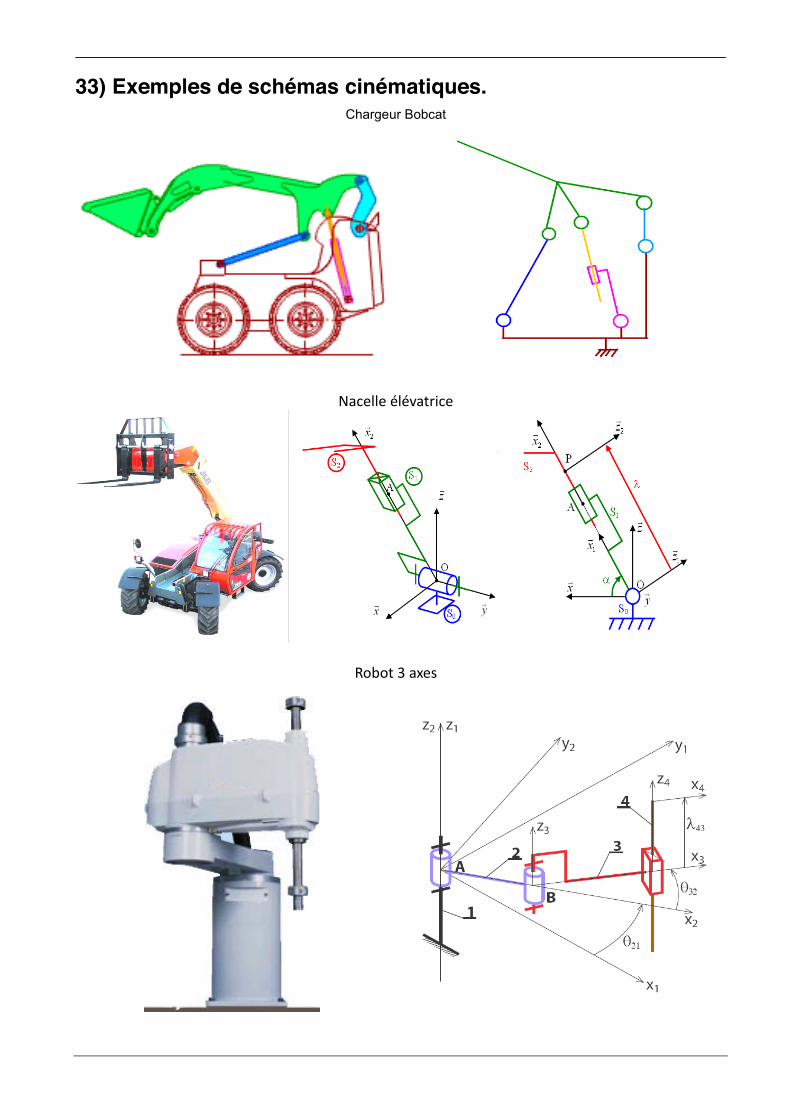
33) Exemples de schémas cinématiques. Chargeur Bobcat
Nacelle élévatrice
Robot 3 axes
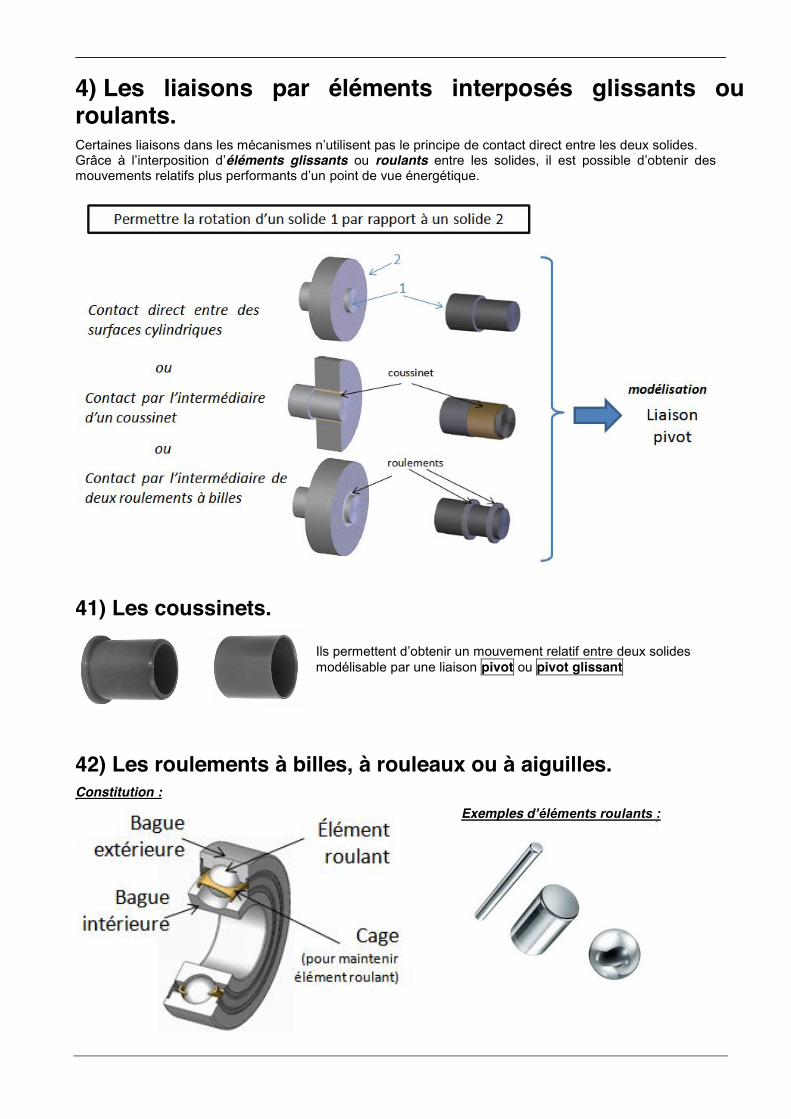
4) Les liaisons par éléments interposés glissants ou roulants.
de contact direct entre les deux solides. éléments glissants ou roulants
point de vue énergétique.
41) Les coussinets.
entre deux solides modélisable par une liaison pivot ou pivot glissant
42) Les roulements à billes, à rouleaux ou à aiguilles. Constitution :
Exemples
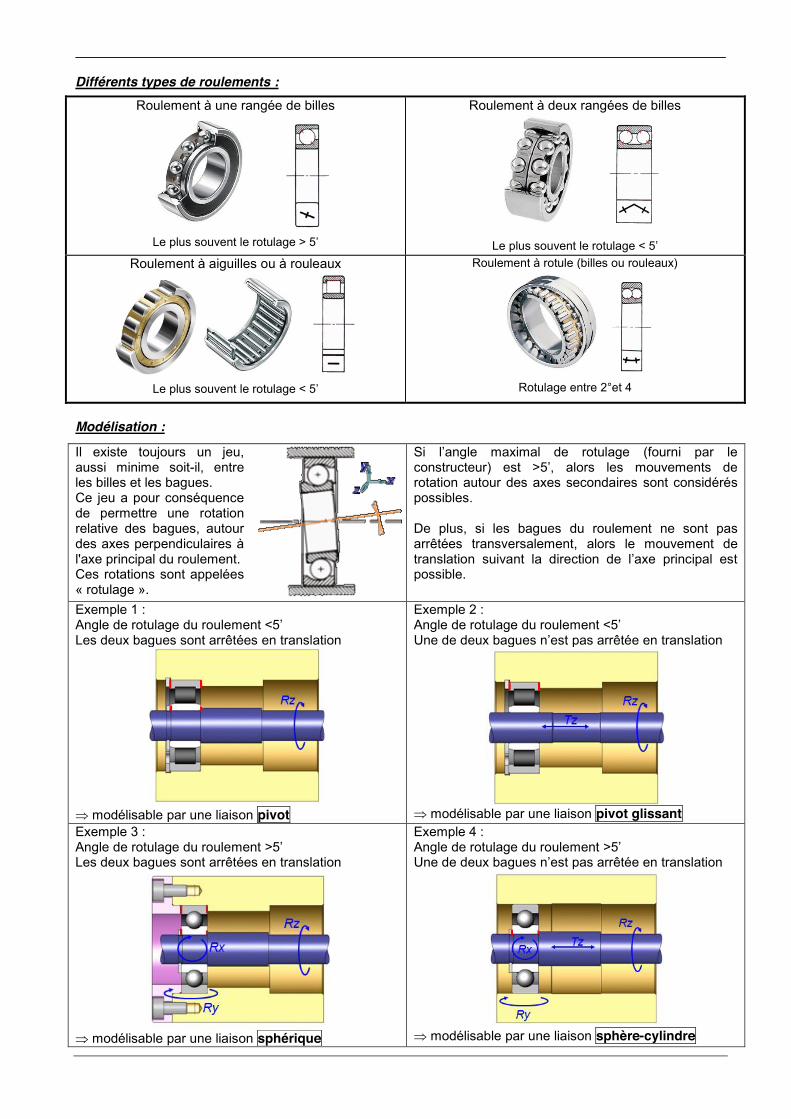
Différents types de roulements :
Roulement à une rangée de billes
Roulement à deux rangées de billes
Roulement à aiguilles ou à rouleaux
Roulement à rotule (billes ou rouleaux)
Rotulage entre 2°et 4
Modélisation :
Il existe toujours un jeu, aussi minime soit-il, entre les billes et les bagues. Ce jeu a pour conséquence de permettre une rotation relative des bagues, autour des axes perpendiculaires à l'axe principal du roulement. Ces rotations sont appelées « rotulage ».
(fourni par le constructeur) alors les mouvements de rotation autour des axes secondaires sont considérés possibles. De plus, si les bagues du roulement ne sont pas arrêtées transversalement, alors le mouvement de translation possible.
Exemple 1 : Angle de rotulage du Les deux bagues sont arrêtées en translation
modélisable par une liaison pivot
Exemple 2 :
modélisable par une liaison pivot glissant
Exemple 3 : Angle de rotulage du roulement > Les deux bagues sont arrêtées en translation
modélisable par une liaison sphérique
Exemple 4 : Angle de rotulage du roulement >
modélisable par une liaison sphère-cylindre
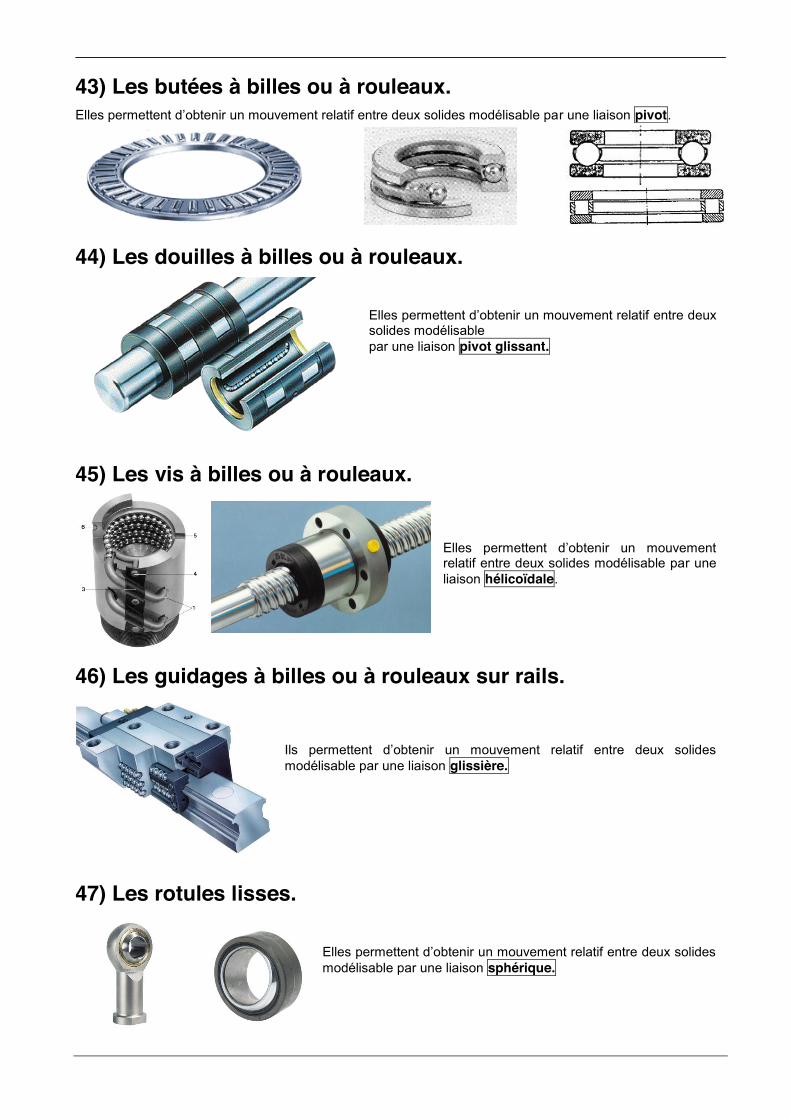
43) Les butées à billes ou à rouleaux. r une liaison pivot.
44) Les douilles à billes ou à rouleaux.
entre deux solides modélisable par une liaison pivot glissant.
45) Les vis à billes ou à rouleaux.
relatif entre deux solides modélisable par une liaison hélicoïdale.
46) Les guidages à billes ou à rouleaux sur rails.
modélisable par une liaison glissière.
47) Les rotules lisses. Elles modélisable par une liaison sphérique.
5) Graphe de structure 51)
Schéma cinématique minimal
Permet de visualiser
la cinématique du mécanisme
des différentes
(c'est-à-dire la disposition des liaisons)
tient compte du choix des constituants adoptés Est construit à partir du graphe de liaison graphe de structure
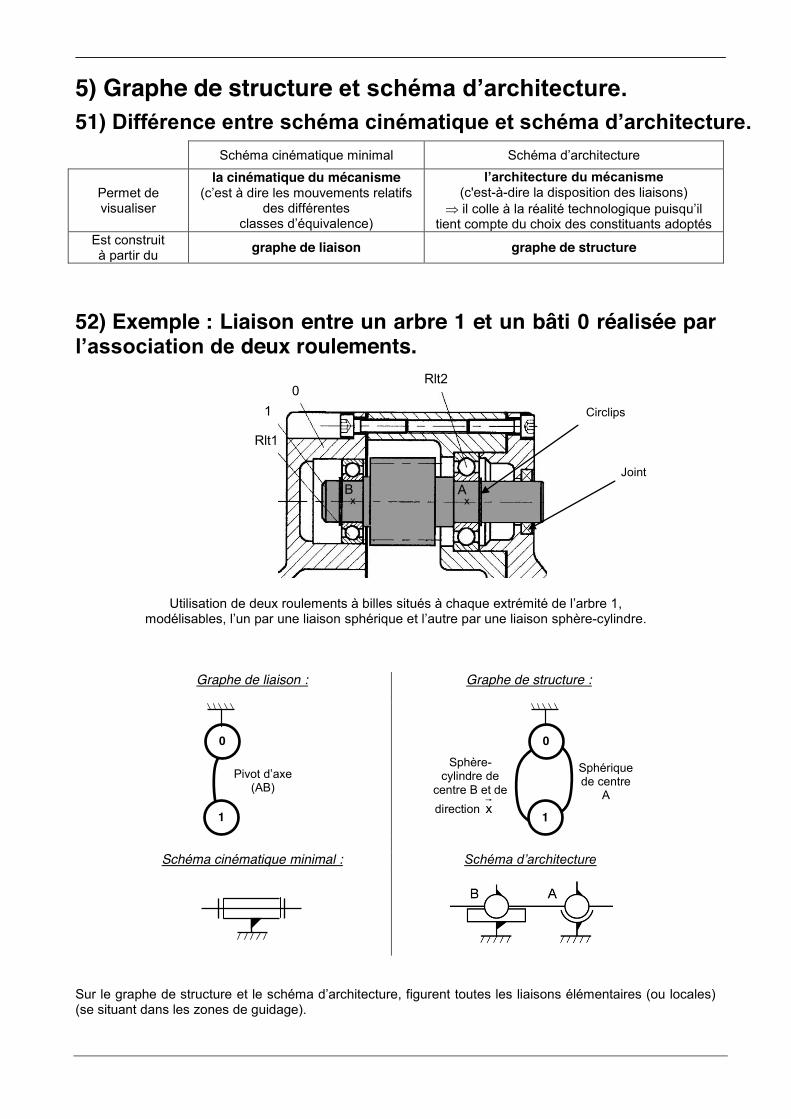
52) Exemple : Liaison entre un arbre 1 et un bâti 0 réalisée par deux roulements.
Utilisation de deux roulements à billes , sphérique sphère-cylindre.
Graphe de liaison :
Graphe de structure :
0
(AB)
1
0
Sphérique de centre
A
1
Sphère-cylindre de
centre B et de direction x
Schéma cinématique minimal :
(se situant dans les zones de guidage).
0 Rlt2
Rlt1
1
A B x x
Circlips
Joint
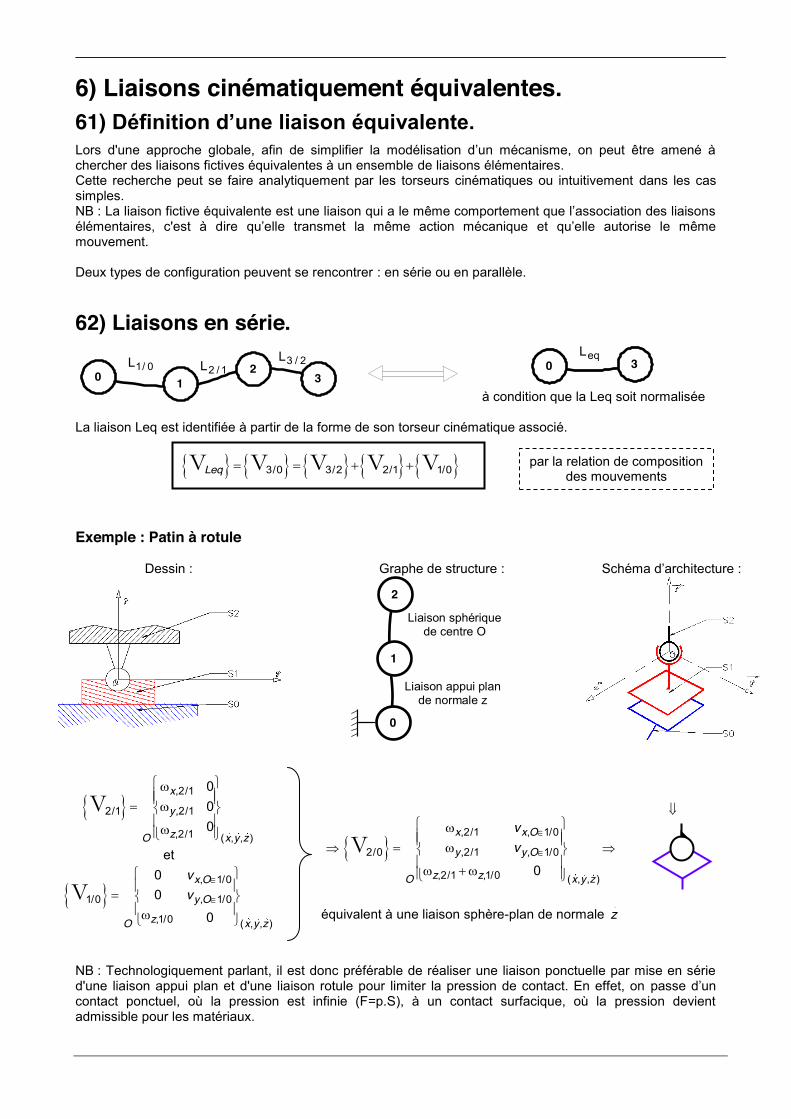
6) Liaisons cinématiquement équivalentes. 61)
chercher des liaisons fictives équivalentes à un ensemble de liaisons élémentaires. Cette recherche peut se faire analytiquement par les torseurs cinématiques ou intuitivement dans les cas simples. NB élémentairesmouvement. Deux types de configuration peuvent se rencontrer : en série ou en parallèle.
62) Liaisons en série.
0
0/1L
1 2
3 1/2L 2/3L
1 L2
L1
1Léq.
2L3 2
0 eqL
3
à condition que la Leq soit normalisée La liaison Leq est identifiée à partir de la forme de son torseur cinématique associé.
3/0 3/2 2/1 1/0LeqV V V V V Exemple : Patin à rotule
Dessin : Graphe de structure : cture :
0
Liaison appui plan de normale z
1
2
Liaison sphérique de centre O
,2/1
2/1 ,2/1
,2/1 ( , , )
000
x
y
zO x y z
V
et
, 1/0
1/0 , 1/0
,1/0 ( , , )
00
0
x O
y O
zO x y z
vvV
,2/1 , 1/0
2/0 ,2/1 , 1/0
,2/1 ,1/0 ( , , )0
x x O
y y O
z zO x y z
vvV
équivalent à une liaison sphère-plan de normale z
NB : Technologiquement parlant, il est donc préférable de réaliser une liaison ponctuelle par mise en série d'une liaison appui plan et d'une liaison rotule pour limiter la pression de contact. En effet, on contact ponctuel, où la pression est infinie (F=p.S), à un contact surfacique, où la pression devient admissible pour les matériaux.
par la relation de composition des mouvements
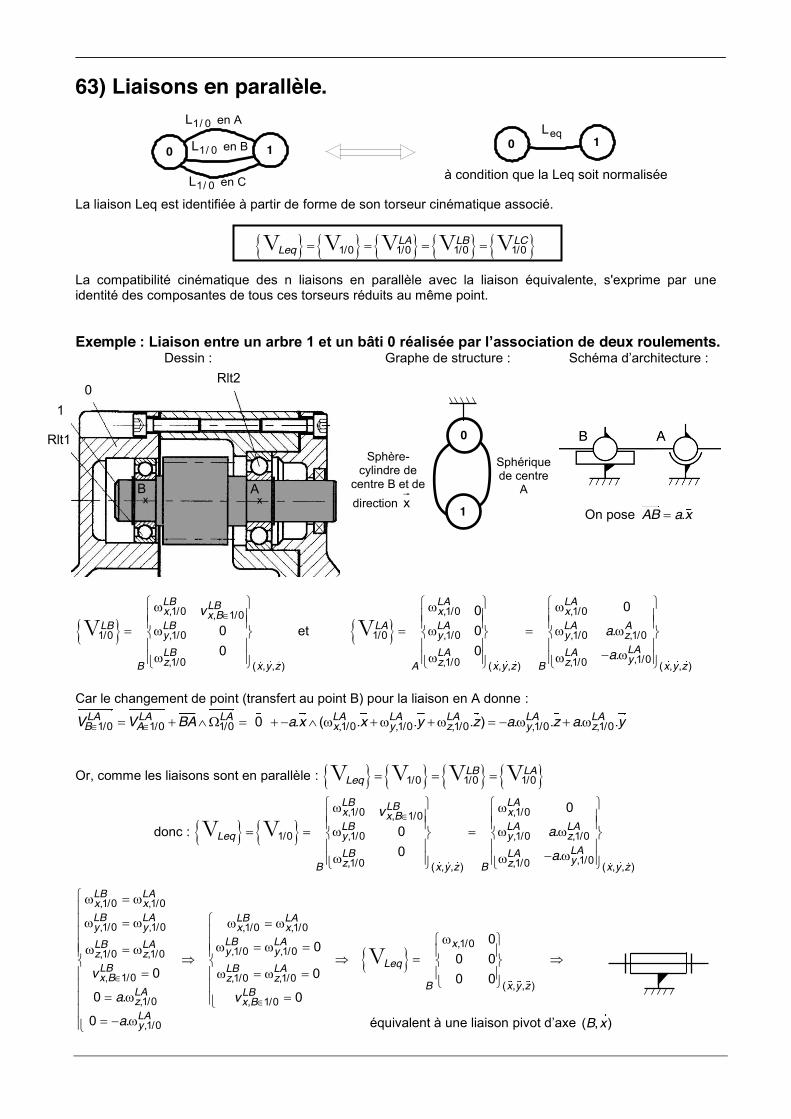
63) Liaisons en parallèle.
0
0/1L en A
1 0/1L en B
0/1L en C
1 L2
L1
1Léq.
2L3 2
0 eqL
1
à condition que la Leq soit normalisée
La liaison Leq est identifiée à partir de forme de son torseur cinématique associé.
1/0 1/0 1/0 1/0LA LB LC
LeqV V V V V
La compatibilité cinématique des n liaisons en parallèle avec la liaison équivalente, s'exprime par une identité des composantes de tous ces torseurs réduits au même point. Exemple deux roulements.
Dessin : Graphe de structure : :
0
Sphérique de centre
A
1
Sphère-cylindre de
centre B et de direction x
On pose .AB a x
,1/0 , 1/0
1/0 ,1/0
,1/0 ( , , )
00
LB LBx x BLB LB
yLBzB x y z
vV et
,1/0 ,1/0
1/0 ,1/0 ,1/0 ,1/0
,1/0,1/0 ,1/0( , , ) ( , , )
000 .0 .
LA LAx x
LA LA LA Ay y z
LALA LA yz zA x y z B x y z
a
a
V
Car le changement de point (transfert au point B) pour la liaison en A donne :
1/0 1/0 1/0 ,1/0 ,1/0 ,1/0 ,1/0 ,1/00 . ( . . . ) . . . .LA LA LA LA LA LA LA LAB A x y z y zV V BA a x x y z a z a y
Or, comme les liaisons sont en parallèle : 1/0 1/0 1/0LB LA
LeqV V V V
donc : ,1/0 ,1/0, 1/0
1/0 ,1/0 ,1/0 ,1/0
,1/0,1/0 ,1/0( , , ) ( , , )
0
0 .0 .
LB LALBx xx BLB LA LA
Leq y y zLALB LA yz zB x y z B x y z
va
a
V V
,1/0 ,1/0
,1/0 ,1/0 ,1/0 ,1/0,1/0
,1/0 ,1/0,1/0 ,1/0
, 1/0 ,1/0 ,1/0
,1/0 , 1/0
,1/0
000 0
0 0 0 00 . 0
0 .
LB LAx xLB LA LB LAy y x x
LB LA xLB LA y yz zLeqLB LB LA
x B z zBLA LB
z x BLAy
v
a va
V( , , )x y z
0 Rlt2
Rlt1
1
A B x x
équivalent à une liaison ( , )B x
7) Loi entrée- 71) -sortie. On appelle relations entre les paramètres de
(ou de leurs dérivées) du « solide de sortie ». NB . Dans l'exemple de la pompe, le solide d'entrée est l'arbre, et le solide de sortie le piston. La loi entrée-sortie est donc la relation La manière dont on obtient cette loi entrée-sortie dépend de la configuration de la chaine cinématique.
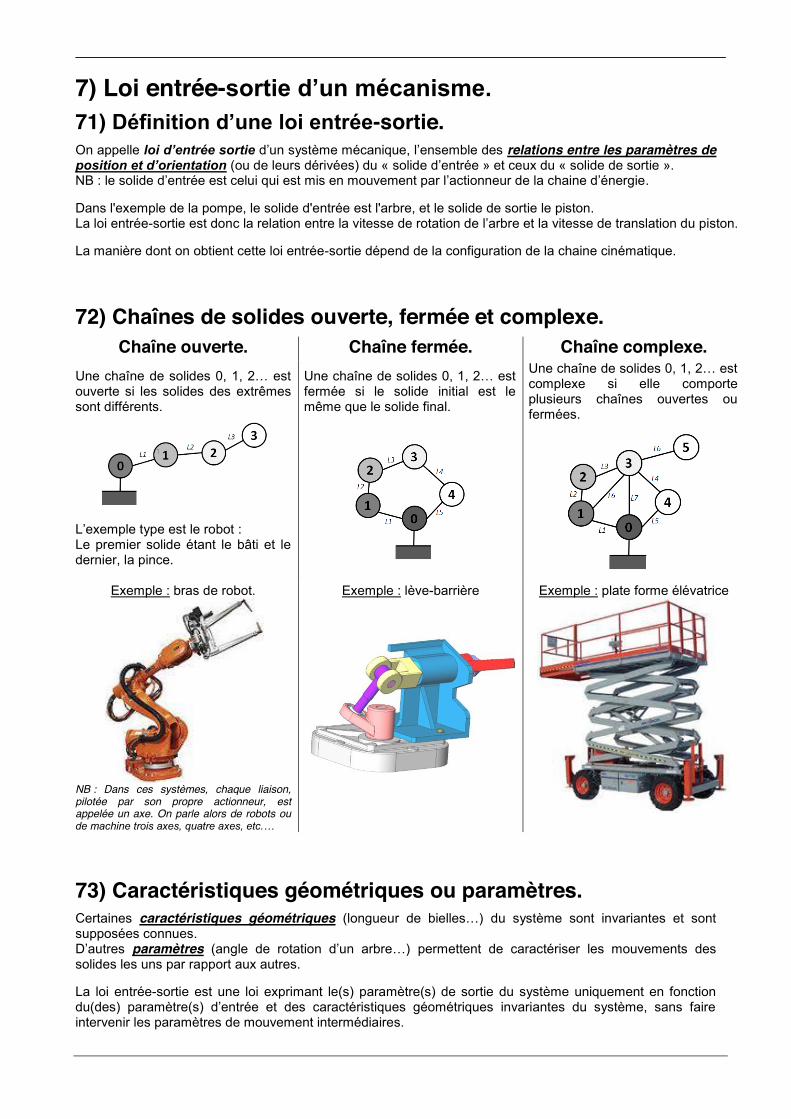
72) Chaînes de solides ouverte, fermée et complexe. Chaîne ouverte. Chaîne fermée. Chaîne complexe.
ouverte si les solides des extrêmes sont différents.
fermée si le solide initial est le même que le solide final.
complexe si elle comporte plusieurs chaînes ouvertes ou fermées.
: Le premier solide étant le bâti et le dernier, la pince.
Exemple : bras de robot.
NB : Dans ces systèmes, chaque liaison, pilotée par son propre actionneur, est appelée un axe. On parle alors de robots ou
Exemple : lève-barrière
Exemple : plate forme élévatrice
73) Caractéristiques géométriques ou paramètres. Certaines caractéristiques géométriques du système sont invariantes et sont supposées connues.
paramètres permettent de caractériser les mouvements des solides les uns par rapport aux autres. La loi entrée-sortie est une loi exprimant le(s) paramètre(s) de sortie du système uniquement en fonction
intervenir les paramètres de mouvement intermédiaires.
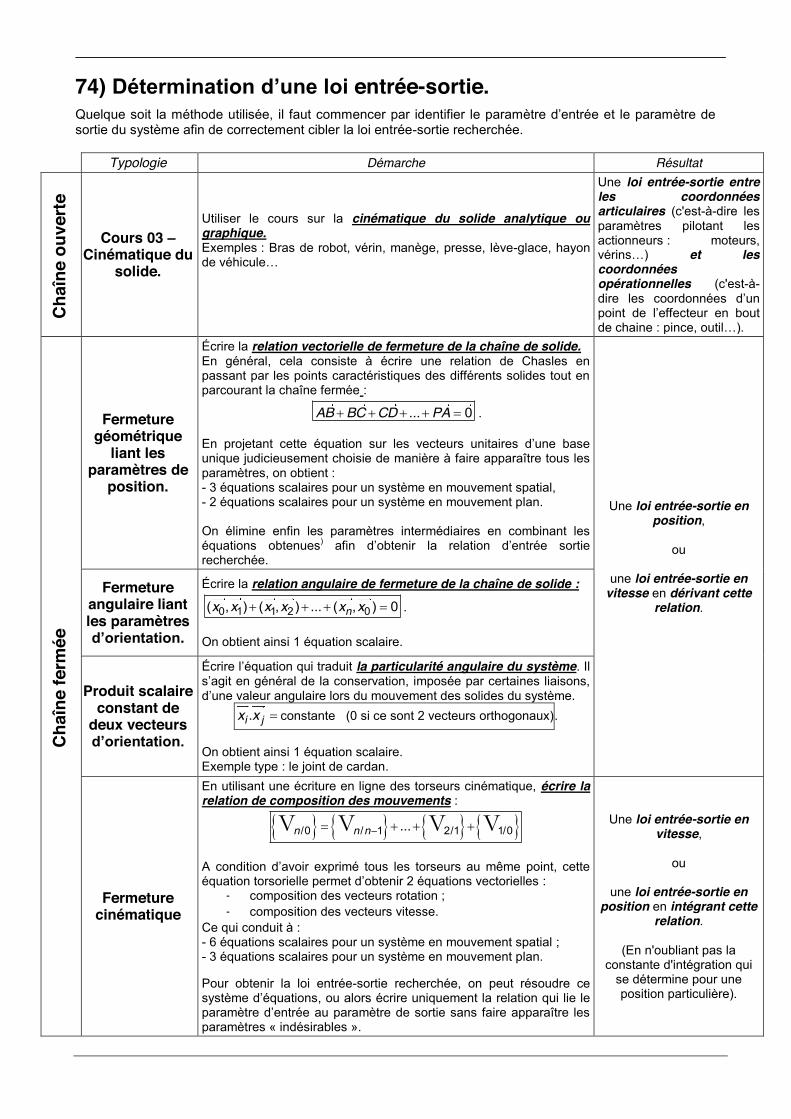
74) entrée-sortie.
sortie du système afin de correctement cibler la loi entrée-sortie recherchée.
Typologie Démarche Résultat
Cha
îne
ouve
rte
Cours 03 Cinématique du
solide.
Utiliser le cours sur la cinématique du solide analytique ou graphique. Exemples : Bras de robot, vérin, manège, presse, lève-glace, hayon
Une loi entrée-sortie entre les coordonnées articulaires (c'est-à-dire les paramètres pilotant les actionneurs : moteurs,
et les coordonnées opérationnelles (c'est-à-
de chaine ).
Cha
îne
ferm
ée
Fermeture géométrique
liant les paramètres de
position.
Écrire la relation vectorielle de fermeture de la chaîne de solide. En général, cela consiste à écrire une relation de Chasles en passant par les points caractéristiques des différents solides tout en parcourant la chaîne fermée :
... 0AB BC CD PA .
unique judicieusement choisie de manière à faire apparaître tous les paramètres, on obtient : - 3 équations scalaires pour un système en mouvement spatial, - 2 équations scalaires pour un système en mouvement plan. On élimine enfin les paramètres intermédiaires en combinant les équations obtenues) recherchée.
Une loi entrée-sortie en position,
ou
une loi entrée-sortie en
vitesse en dérivant cette relation.
Fermeture angulaire liant les paramètres
.
Écrire la relation angulaire de fermeture de la chaîne de solide :
0 1 1 2 0( , ) ( , ) ... ( , ) 0nx x x x x x . On obtient ainsi 1 équation scalaire.
Produit scalaire constant de
deux vecteurs
la particularité angulaire du système. Il
.i jx x constante (0 si ce sont 2 vecteurs orthogonaux).
On obtient ainsi 1 équation scalaire. Exemple type : le joint de cardan.
Fermeture cinématique
En utilisant une écriture en ligne des torseurs cinématique, écrire la relation de composition des mouvements :
/0 / 1 2/1 1/0...n n nV V V V
: -‐ composition des vecteurs rotation ; -‐ composition des vecteurs vitesse.
Ce qui conduit à : - 6 équations scalaires pour un système en mouvement spatial ; - 3 équations scalaires pour un système en mouvement plan. Pour obtenir la loi entrée-sortie recherchée, on peut résoudre ce
, ou alors écrire uniquement la relation qui lie le
paramètres « indésirables ».
Une loi entrée-sortie en vitesse,
ou
une loi entrée-sortie en
position en intégrant cette relation.
(En n'oubliant pas la
constante d'intégration qui se détermine pour une position particulière).
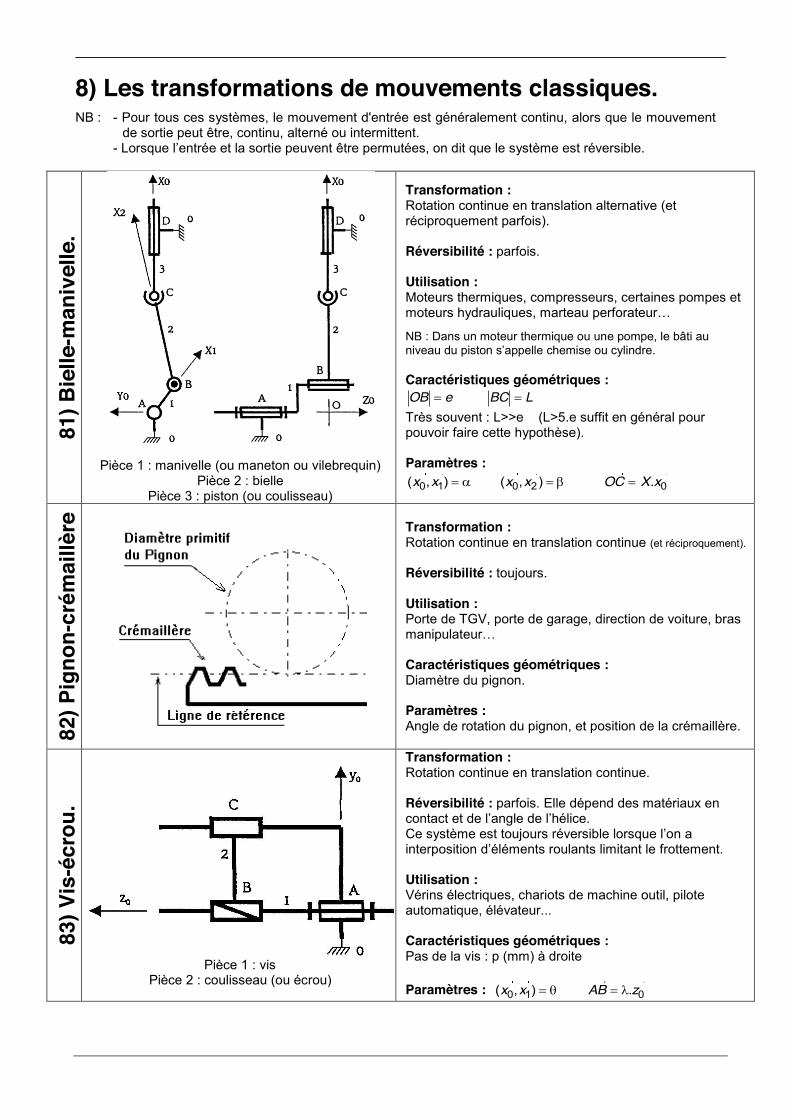
8) Les transformations de mouvements classiques. NB : - Pour tous ces systèmes, le mouvement d'entrée est généralement continu, alors que le mouvement
de sortie peut être, continu, alterné ou intermittent. -
81) B
ielle
-man
ivel
le.
Pièce 1 : manivelle (ou maneton ou vilebrequin)
Pièce 2 : bielle Pièce 3 : piston (ou coulisseau)
Transformation : Rotation continue en translation alternative (et réciproquement parfois). Réversibilité : parfois. Utilisation : Moteurs thermiques, compresseurs, certaines pompes et
NB : Dans un moteur thermique ou une pompe, le bâti au
Caractéristiques géométriques : OB e BC L Très souvent : L>>e (L>5.e suffit en général pour pouvoir faire cette hypothèse). Paramètres :
0 1( , )x x 0 2( , )x x 0.OC X x
82) P
igno
n-cr
émai
llère
Transformation : Rotation continue en translation continue (et réciproquement). Réversibilité : toujours. Utilisation : Porte de TGV, porte de garage, direction de voiture, bras
Caractéristiques géométriques : Diamètre du pignon. Paramètres : Angle de rotation du pignon, et position de la crémaillère.
83) V
is-é
crou
.
Pièce 1 : vis
Pièce 2 : coulisseau (ou écrou)
Transformation : Rotation continue en translation continue. Réversibilité : parfois. Elle dépend des matériaux en
Ce système est toujours a
frottement. Utilisation : Vérins électriques, chariots de machine outil, pilote automatique, élévateur... Caractéristiques géométriques : Pas de la vis : p (mm) à droite Paramètres : 0 1( , )x x 0.AB z
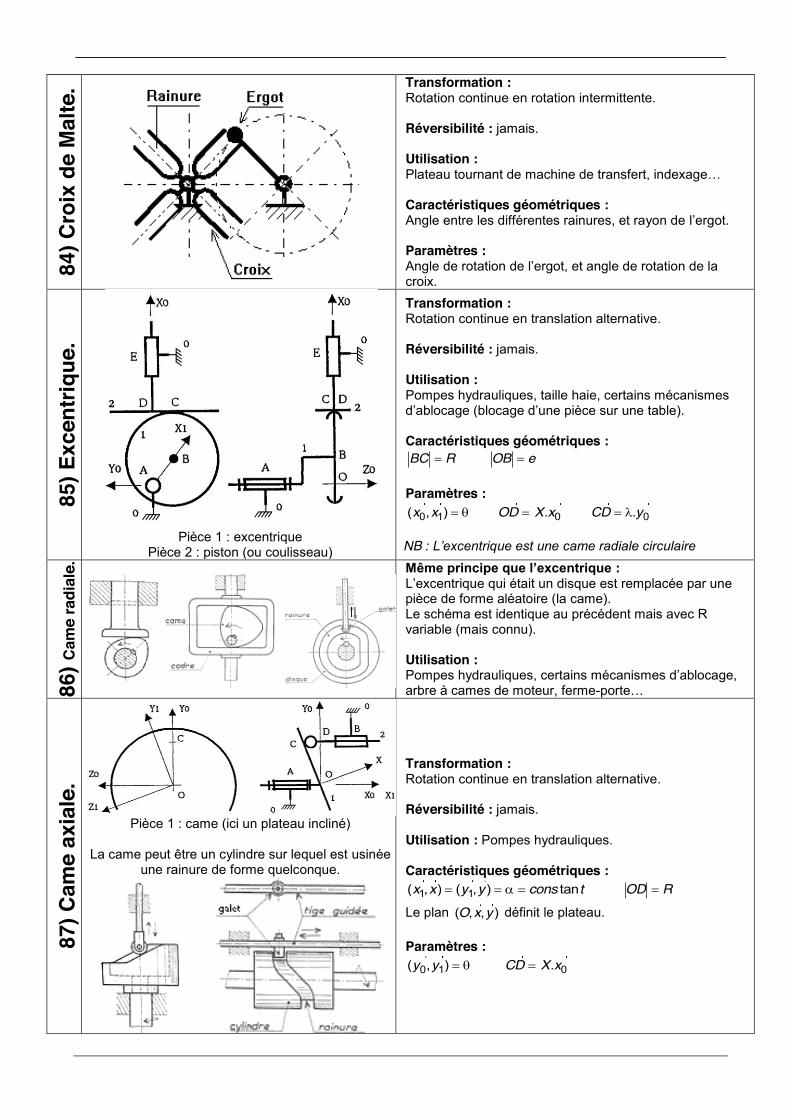
84) C
roix
de
Mal
te.
Transformation : Rotation continue en rotation intermittente. Réversibilité : jamais. Utilisation :
Caractéristiques géométriques : Angle entre les différentes rainures, et rayon de Paramètres :
croix.
85) E
xcen
triqu
e.
Pièce 1 : excentrique
Pièce 2 : piston (ou coulisseau)
Transformation : Rotation continue en translation alternative. Réversibilité : jamais. Utilisation : Pompes hydrauliques, taille haie, certains mécanismes
Caractéristiques géométriques : BC R OB e
Paramètres :
0 1( , )x x 0.OD X x 0.CD y NB
86) C
ame
radi
ale.
:
pièce de forme aléatoire (la came). Le schéma est identique au précédent mais avec R variable (mais connu). Utilisation :
arbre à cames de moteur, ferme-
87) C
ame
axia
le.
Pièce 1 : came (ici un plateau incliné)
La came peut être un cylindre sur lequel est usinée
une rainure de forme quelconque.
Transformation : Rotation continue en translation alternative. Réversibilité : jamais. Utilisation : Pompes hydrauliques. Caractéristiques géométriques :
1 1( , ) ( , ) tanx x y y cons t OD R
Le plan ( , , )O x y définit le plateau. Paramètres :
0 1( , )y y 0.CD X x
9) Les réducteurs et multiplicateurs de vitesse. Dans un système,
de cette énergie, on utilise un transmetteur permettant de réduire ou de multiplier la vitesse angulaire. On peut classer ces transmetteurs en deux grandes familles vis à vis de la technologie employée pour transmettre le mouvement : ceux utilisant la transmission par adhérence : roue à friction (exemple : dynamo de vélo), dispositif poulie-
courroie lisse (exemple : alternateur de voiture) ; ceux utilisant la transmission par obstacle : dispositif poulie-courroie crantée (exemple : courroie de
dispositif pignon-chaîne (exemple : vélo, moto), engrenages (exemple : boite de vitesse).
91) Rapport de transmission, de réduction et de multiplication.
: /0
/0
e
si (avec 0 le bâti).
Un rapport de réduction ou de multiplication est toujours supérieur à 1. Ainsi, pour un réducteur, le rapport de réduction est i et pour un multiplicateur, le rapport de multiplication est 1/i.
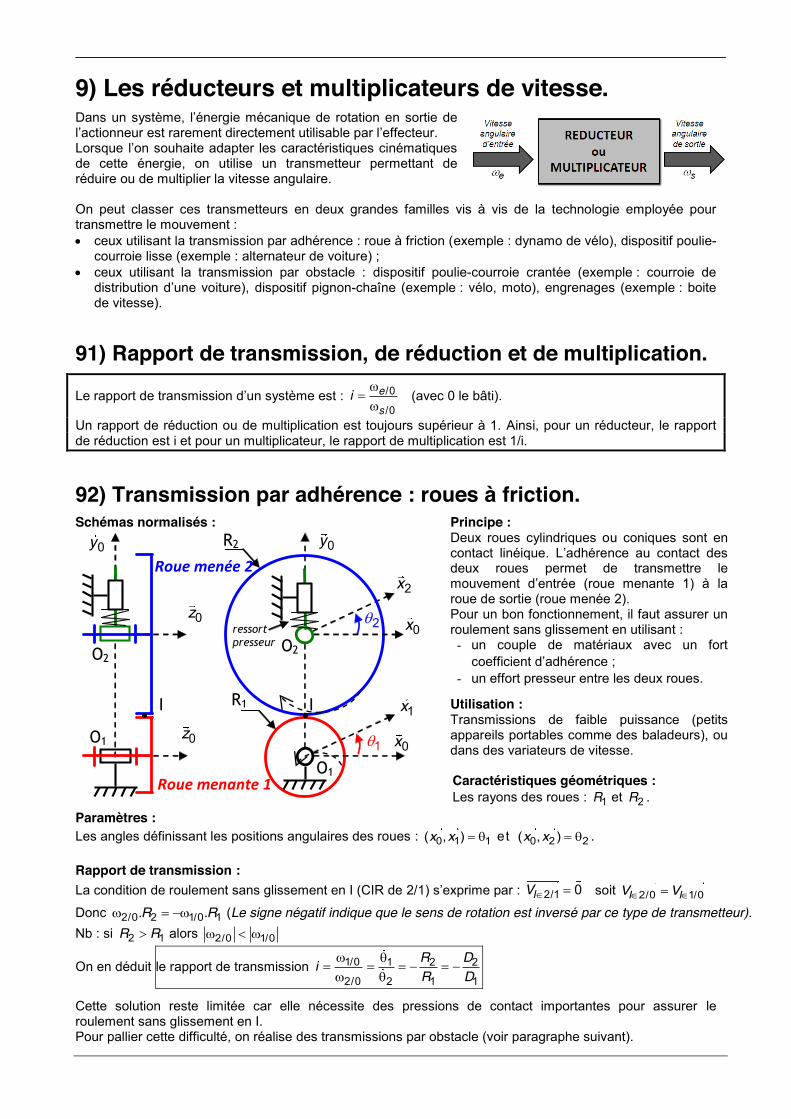
92) Transmission par adhérence : roues à friction. Schémas normalisés :
0xA
Roue menante 1 O1
0xA
0yA
1x
2x
1
O2
2
O1
O2
0yA
0zA
0zA
I
R1
R2
Roue menée 2
I
ressort
presseur
Principe : Deux roues cylindriques ou coniques sont en
deux roues permet de transmettre le
roue de sortie (roue menée 2). Pour un bon fonctionnement, il faut assurer un roulement sans glissement en utilisant : - un couple de matériaux avec un fort
; - un effort presseur entre les deux roues.
Utilisation : Transmissions de faible puissance (petits appareils portables comme des baladeurs), ou dans des variateurs de vitesse. Caractéristiques géométriques : Les rayons des roues : 1R et 2R .
Paramètres : Les angles définissant les positions angulaires des roues : 0 1 1( , )x x et 0 2 2( , )x x . Rapport de transmission : La condition de roulement sans glissement en I (CIR de 2/1 : 2/1 0IV soit 2/0 1/0I IV V
Donc 2/0 2 1/0 1. .R R (Le signe négatif indique que le sens de rotation est inversé par ce type de transmetteur). Nb : si 2 1R R alors 2/0 1/0
On en déduit le rapport de transmission 1/0 1 2 2
2/0 1 12
R DiR D
Cette solution reste limitée car elle nécessite des pressions de contact importantes pour assurer le roulement sans glissement en I. Pour pallier cette difficulté, on réalise des transmissions par obstacle (voir paragraphe suivant).
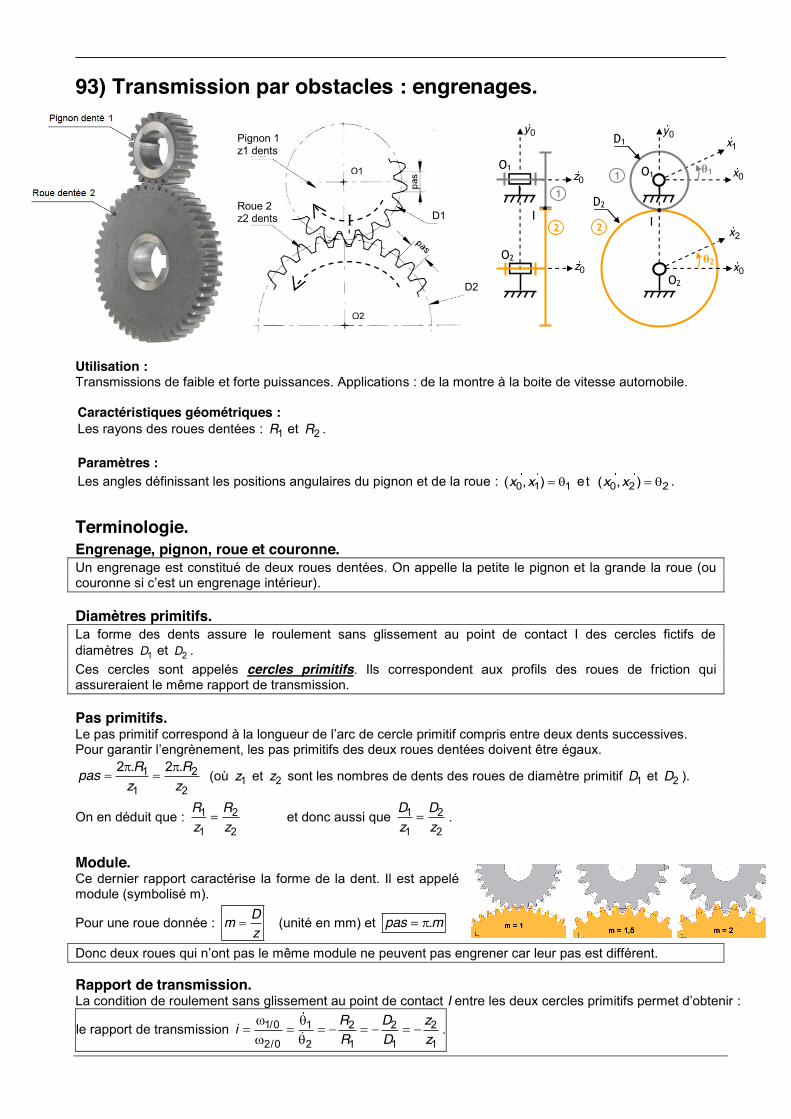
93) Transmission par obstacles : engrenages.
0xA
O2 0x
A
0yA
2x
1x
2
2
1 O1 1
O2
O1
0yA
0zA
0zA
2
1
I I
D2
D1
Utilisation : Transmissions de faible et forte puissances. Applications : de la montre à la boite de vitesse automobile. Caractéristiques géométriques : Les rayons des roues dentées : 1R et 2R . Paramètres : Les angles définissant les positions angulaires du pignon et de la roue : 0 1 1( , )x x e t 0 2 2( , )x x .
Terminologie. Engrenage, pignon, roue et couronne. Un engrenage est constitué de deux roues dentées. On appelle la petite le pignon et la grande la roue (ou
. Diamètres primitifs. La forme des dents assure le roulement sans glissement au point de contact I des cercles fictifs de diamètres 1D et 2D . Ces cercles sont appelés cercles primitifs. Ils correspondent aux profils des roues de friction qui assureraient le même rapport de transmission. Pas primitifs.
nt être égaux.
1 2
1 2
2 . 2 .R Rpasz z
(où 1z et 2z sont les nombres de dents des roues de diamètre primitif 1D et 2D ).
On en déduit que : 1 2
1 2
R Rz z
et donc aussi que 1 2
1 2
D Dz z
.
Module. Ce dernier rapport caractérise la forme de la dent. Il est appelé module (symbolisé m).
Pour une roue donnée : Dmz
(unité en mm) et .pas m
Rapport de transmission. La condition de roulement sans glissement au point de contact I :
le rapport de transmission 1/0 1 2 2 2
2/0 1 1 12
R D ziR D z
.
Pignon 1 z1 dents
Roue 2 z2 dents I D1
D2
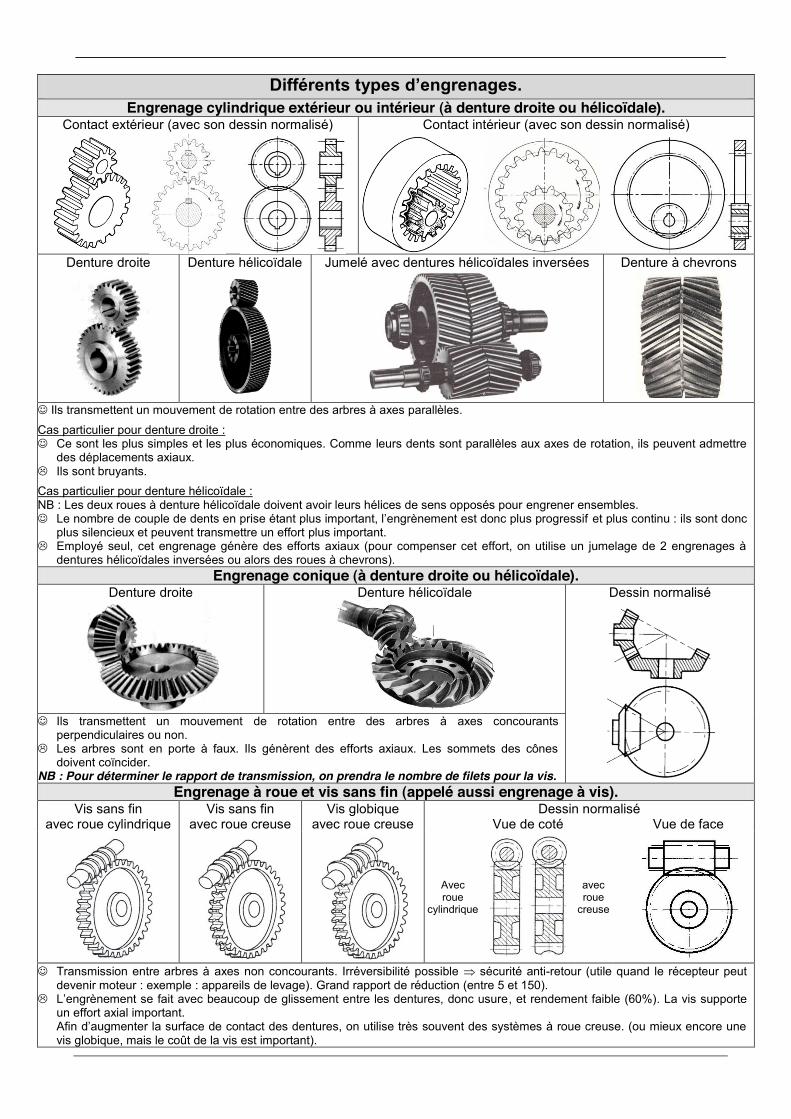
Engrenage cylindrique extérieur ou intérieur (à denture droite ou hélicoïdale).
Contact extérieur (avec son dessin normalisé) Contact intérieur (avec son dessin normalisé)
Denture droite Denture hélicoïdale Jumelé avec dentures hélicoïdales inversées Denture à chevrons
Ils transmettent un mouvement de rotation entre des arbres à axes parallèles.
Cas particulier pour denture droite : Ce sont les plus simples et les plus économiques. Comme leurs dents sont parallèles aux axes de rotation, ils peuvent admettre
des déplacements axiaux. Ils sont bruyants.
Cas particulier pour denture hélicoïdale : NB : Les deux roues à denture hélicoïdale doivent avoir leurs hélices de sens opposés pour engrener ensembles.
et plus continu : ils sont donc plus silencieux et peuvent transmettre un effort plus important.
Employé seul, cet engrenage génère des efforts axiaux (pour compenser cet effort, on utilise un jumelage de 2 engrenages à dentures hélicoïdales inversées ou alors des roues à chevrons).
Engrenage conique (à denture droite ou hélicoïdale). Denture droite Denture hélicoïdale Dessin normalisé
Ils transmettent un mouvement de rotation entre des arbres à axes concourants perpendiculaires ou non.
Les arbres sont en porte à faux. Ils génèrent des efforts axiaux. Les sommets des cônes doivent coïncider.
NB : Pour déterminer le rapport de transmission, on prendra le nombre de filets pour la vis. Engrenage à roue et vis sans fin (appelé aussi engrenage à vis).
Vis sans fin avec roue cylindrique
Vis sans fin avec roue creuse
Vis globique avec roue creuse
Dessin normalisé Vue de coté Vue de face
Avec roue
cylindrique
avec roue
creuse
Transmission entre arbres à axes non concourants. Irréversibilité possible sécurité anti-retour (utile quand le récepteur peut
devenir moteur : exemple : appareils de levage). Grand rapport de réduction (entre 5 et 150). , et rendement faible (60%). La vis supporte
un effort axial important.
vis globique, mais le coût de la vis est important).
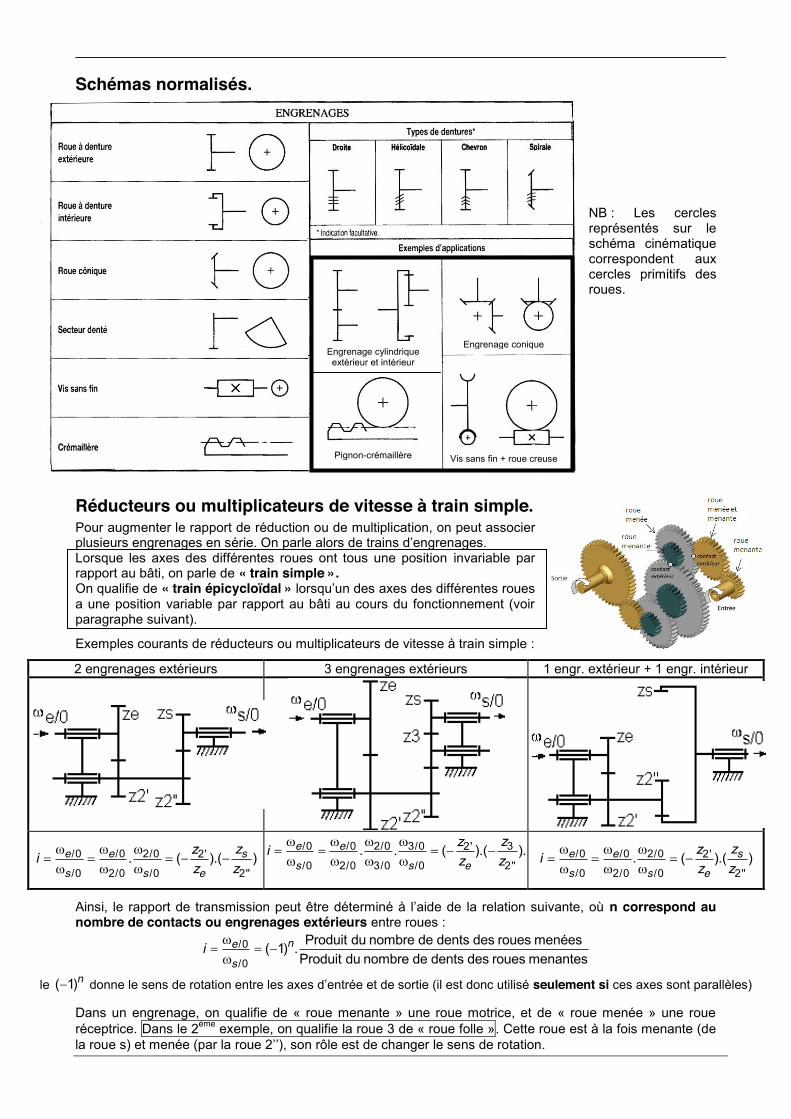
Schémas normalisés.
NB : Les cercles représentés sur le schéma cinématique correspondent aux cercles primitifs des roues.
Réducteurs ou multiplicateurs de vitesse à train simple. Pour augmenter le rapport de réduction ou de multiplication, on peut associer
Lorsque les axes des différentes roues ont tous une position invariable par rapport au bâti, on parle de « train simple ».
On qualifie de « train épicycloïdal » un des axes des différentes roues a une position variable par rapport au bâti au cours du fonctionnement (voir paragraphe suivant).
Exemples courants de réducteurs ou multiplicateurs de vitesse à train simple :
2 engrenages extérieurs 3 engrenages extérieurs 1 engr. extérieur + 1 engr. intérieur
/0 /0 2/0 2'
/0 2/0 /0 2''. ( ).( )e e s
s s e
zziz z
/0 /0 2/0 3/0 32'
/0 2/0 3/0 /0 2'' 3. . ( ).( ).( )e e s
s s e
z zziz z z
/0 /0 2/0 2'
/0 2/0 /0 2''. ( ).( )e e s
s s e
zziz z
Ainsi, n correspond au nombre de contacts ou engrenages extérieurs entre roues :
/0
/0
Produit du nombre de dents des roues menées( 1) .Produit du nombre de dents des roues menantes
ne
si
le ( 1)n donne le sens de rotation entre les axe seulement si ces axes sont parallèles)
Dans un engrenage, on qualifie de « roue menante » une roue motrice, et de « roue menée » une roue réceptrice. Dans le 2ème exemple, on qualifie la roue 3 de « roue folle ». Cette roue est à la fois menante (de
), son rôle est de changer le sens de rotation.
Vis sans fin + roue creuse
Engrenage cylindrique extérieur et intérieur
Engrenage conique
Pignon-crémaillère
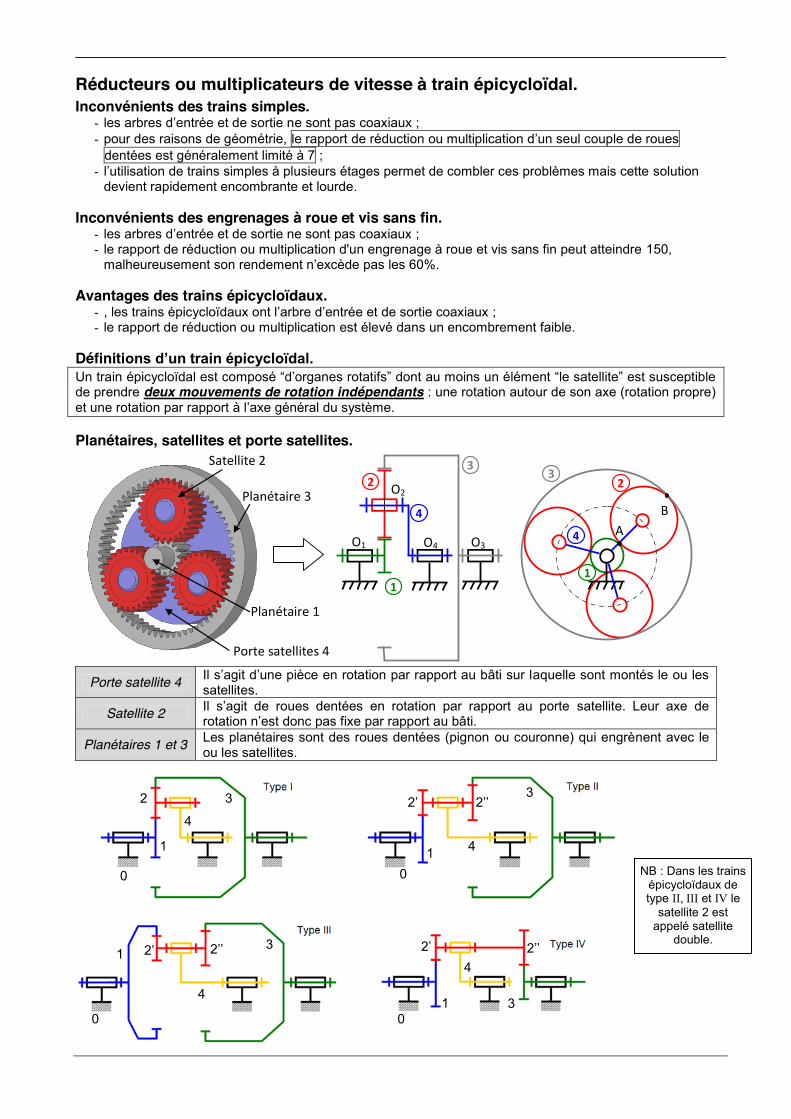
Réducteurs ou multiplicateurs de vitesse à train épicycloïdal. Inconvénients des trains simples. - e sont pas coaxiaux ; - pour des raisons de géométrie, le rapport de réduction ou multiplication un seul couple de roues
dentées est généralement limité à 7 ; - l solution
devient rapidement encombrante et lourde. Inconvénients des engrenages à roue et vis sans fin. - ; - le rapport de réduction ou multiplication d'un engrenage à roue et vis sans fin peut atteindre 150,
malheureusement son . Avantages des trains épicycloïdaux. - ; - le rapport de réduction ou multiplication est élevé dans un encombrement faible.
Définiti
de prendre deux mouvements de rotation indépendants : une rotation autour de son axe (rotation propre)
Planétaires, satellites et porte satellites.
O1 A 4
Re
4
1 1
2 2 3
3
O3 O4
O2 B
Satellite 2
Planétaire 1
Planétaire 3
Porte satellites 4
Porte satellite 4 aquelle sont montés le ou les satellites.
Satellite 2 satellite. Leur axe de
Planétaires 1 et 3 Les planétaires sont des roues dentées (pignon ou couronne) qui engrènent avec le ou les satellites.
1
3
4
0
1
3
4
0
1
3
4
0
1
2
4
0
3
NB : Dans les trains épicycloïdaux de type II, III et IV le
satellite 2 est appelé satellite
double.
Condition géométrique entraînant une relation sur le nombre de dents des différents éléments. Exemple pour un train épi. de type I : 3 1 22.D D D 3 1 22.z z z Exemple pour un train épi. de type II : 1 2' 2'' 3R R R R 1 2' 2'' 3z z z z Loi entrée-sortie : Relation de Willis. Pour déterminer la loi entrée- , on utilise la relation de Willis :
. /0 . /0 . /01 0Pla A Pla B Po Sa avec . /0
. /0
. /0 0Po Sa
Pla A
Pla B
st nulle :
1 ( 1) 0 .
Pla A planétaire A Pla B planétaireB Po Sa porte satellite :
btenu si on immobilise le porte satellite. Cette constante se détermine sans tenir compte du fait que certaines pièces sont bloquées ou ont
une vitesse imposée !!
au bâti de deux des trois entrées possibles ( . /0 . /0 . /0,Pla A Pla B Po Saou ). Cependant dans la pratique, on fixe souvent un des deux planétaires ( . /0 . /00 0Pla A Pla Bou ) et on impose la vitesse de rotation ( . /0 . /0Pla A Pla Bou ). La troisième, la sortie donc ( . /0Po Sa généralement), est alors donnée par la relation de Willis en prenant en compte la vitesse nulle de l'entrée bloquée.
NB : exemple ci-contre) ne modifie pas le comportement cinématique du train, mais permet de mieux répartir les efforts.
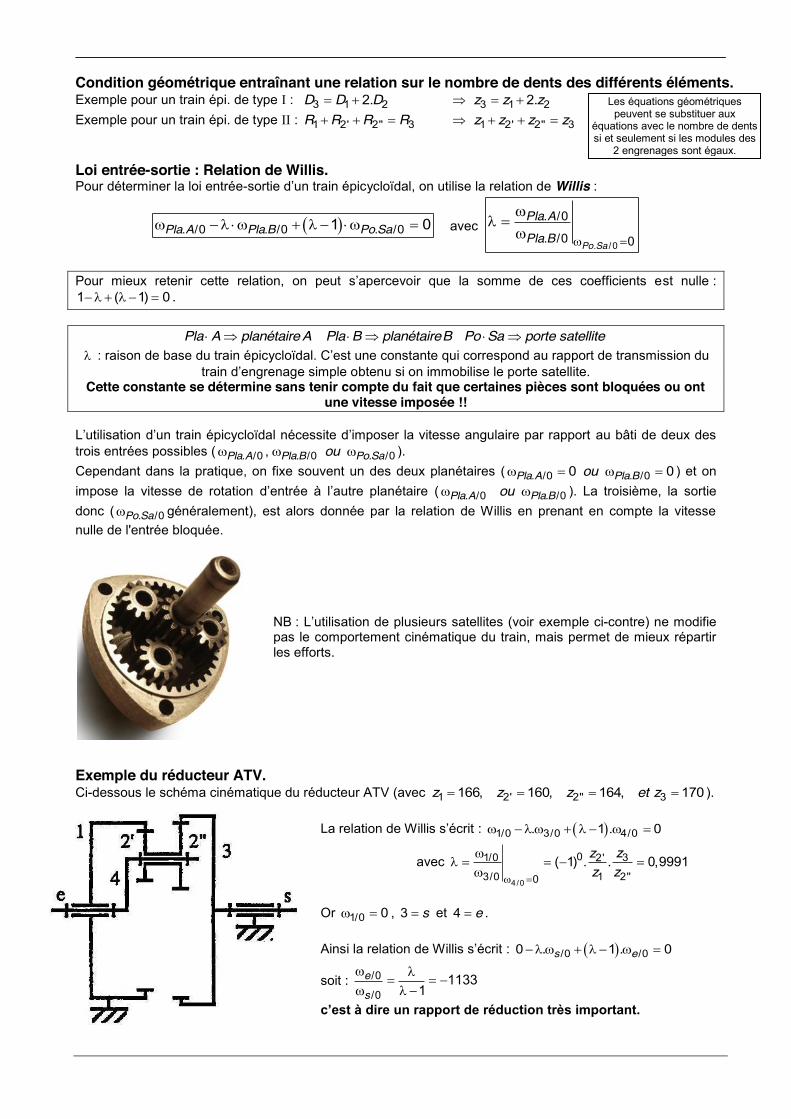
Exemple du réducteur ATV. Ci-dessous le schéma cinématique du réducteur ATV (avec 1 2' 2'' 3166, 160, 164, 170z z z et z ).
: 1/0 3/0 4/0. 1 . 0
avec 4/0
01/0 32'
3/0 1 2''0( 1) . . 0,9991zz
z z
Or 1/0 0 , 3 s et 4 e .
: /0 /00 . 1 . 0s e
soit : /0
/01133
1e
s
Les équations géométriques peuvent se substituer aux
équations avec le nombre de dents si et seulement si les modules des
2 engrenages sont égaux.
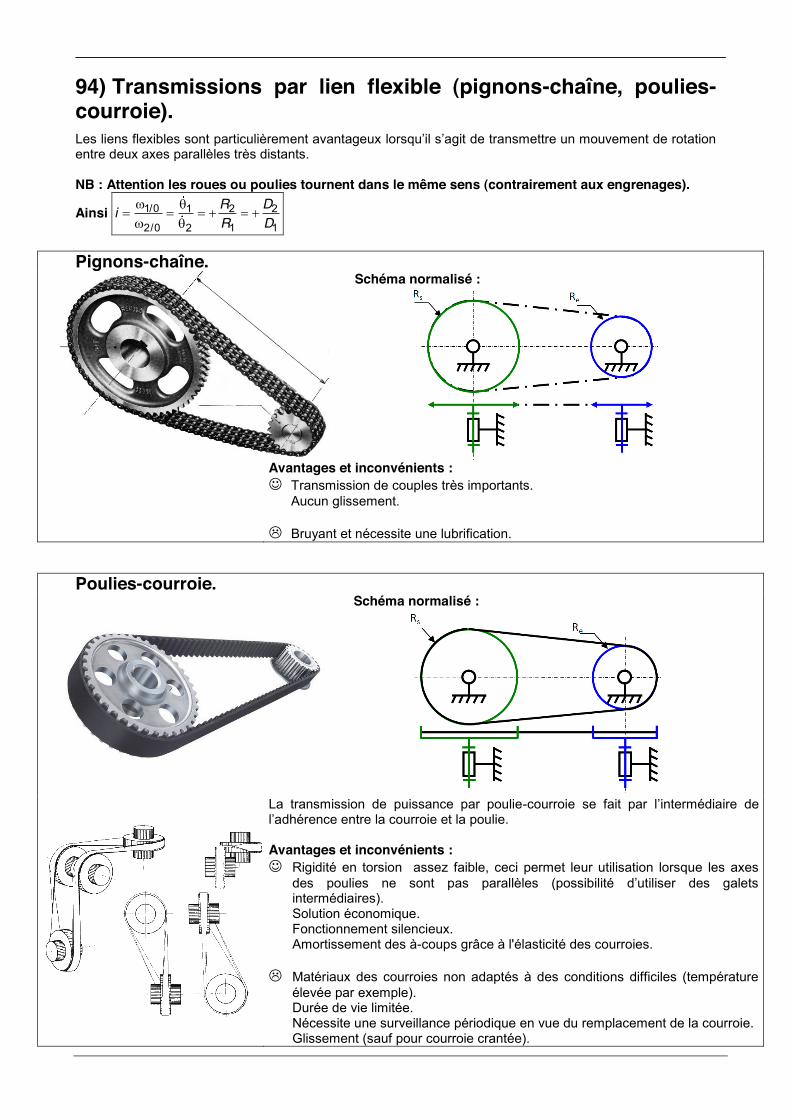
94) Transmissions par lien flexible (pignons-chaîne, poulies-courroie). Les liens flexibles sont particulièrement avantageux transmettre un mouvement de rotation entre deux axes parallèles très distants. NB : Attention les roues ou poulies tournent dans le même sens (contrairement aux engrenages).
Ainsi 1/0 1 2 2
2/0 1 12
R DiR D
Pignons-chaîne.
Schéma normalisé :
Avantages et inconvénients : Transmission de couples très importants.
Aucun glissement.
Bruyant et nécessite une lubrification. Poulies-courroie.
Schéma normalisé :
La transmission de puissance par poulie-courroie se fait par
Avantages et inconvénients :
Rigidité en torsion assez faible, ceci permet leur utilisation lorsque les axes
intermédiaires). Solution économique. Fonctionnement silencieux. Amortissement des à-coups grâce à l'élasticité des courroies.
Matériaux des courroies non adaptés à des conditions difficiles (température élevée par exemple).
Durée de vie limitée. Nécessite une surveillance périodique en vue du remplacement de la courroie. Glissement (sauf pour courroie crantée).